在文章最前面说一下mkfs的意义:即在dev设备上建立相应的数据布局。也就是你输入mkfs指令后,要跟上一个设备参数,于是乎,mkfs执行完毕后,就有了常见的数据布局。
在我们这个mkfs函数中,最终数据布局如下

一:函数流程图
下面是mkfs.pcmfs.c函数流程图
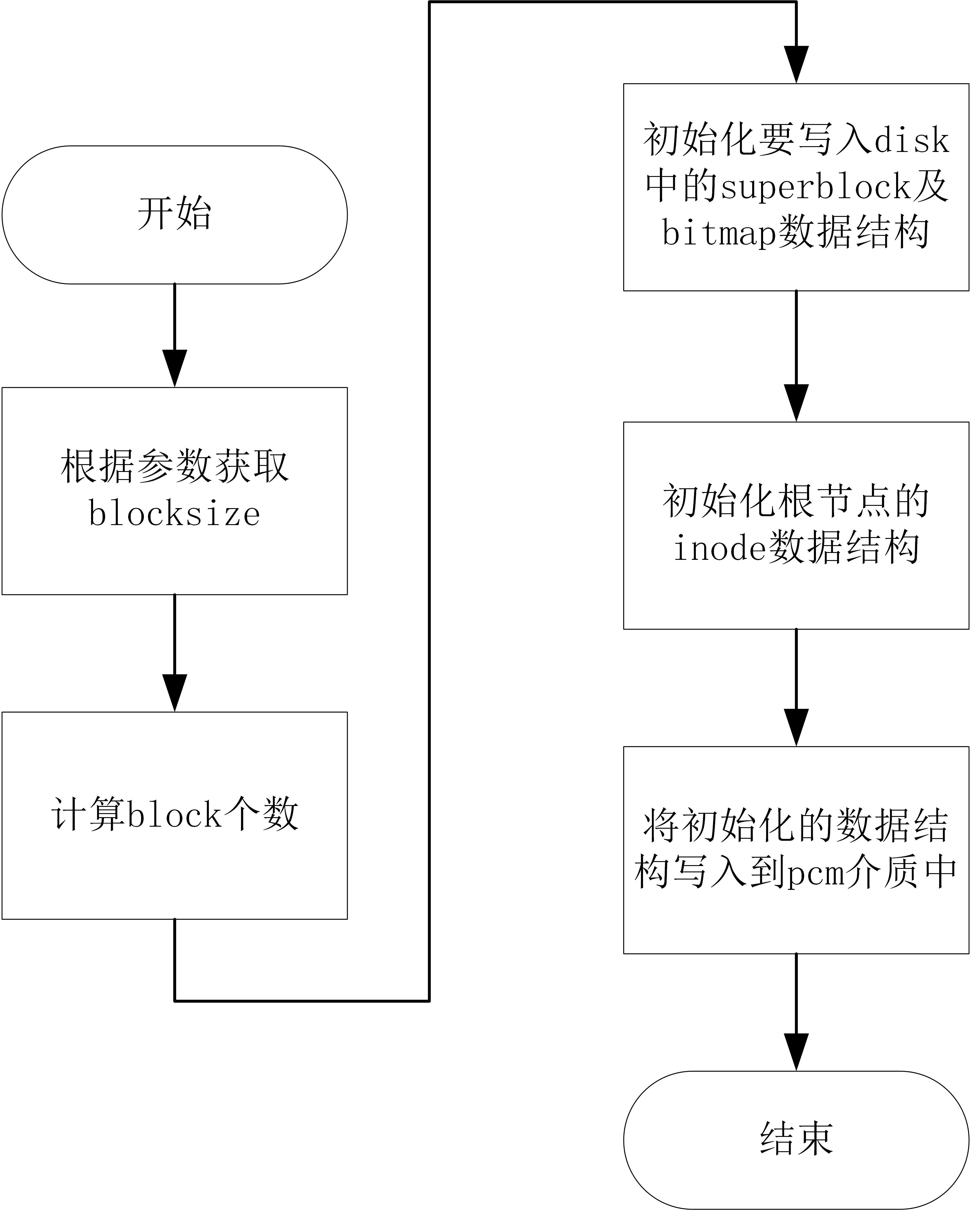
图1 流程图
解释:
1.根据参数获取blocksize:
在输入mkfs指令时,要输入设备参数。如mkfs.pcmfs /dev/sdb1。该指令就是把/dev/sdb1设备格式化为pcmfs文件系统。Main函数会获取参数的设备名,然后通过get_size函数计算出该设备的字节数。在计算出设备的字节数后,在根据blocksize大小计算出该设备的block总数。 get_size函数获取设备大小主要通过count_block函数实现。基本思想是通过read函数返回值得正负来判断是否越界。该函数先利用二乘的思想来确定该dev的粗略的范围,即n未越界,则下次判断2n是否越界。若2n越界则可判断该设备大小在n与2n之间,粗略判断后在通过在n和2n之间的二分查找确定该设备的具体大小。
2.计算block数目
在上述操作后获取了该设备的字节数,于是可以通过BLOCKS=get_size(device_name)/blocksize,来得到该设备包含的block数目。
3.初始化superblock以及bitmap所需要的数据结构
Mkfs的目的是格式化非易失介质,即将非意识介质上文件系统的必要的信息准备好,而superblock以及bitmap的结构是文件系统格式化时写入非易失介质的重要信息,将该信息写入到非意识介质中有两步,第一步是在内存中申请一个对应的空间,将该空间的内容赋值成我们所需要写入非易失介质中的数据;第二步就是通过调用write函数将该数据写入到介质当中。
mkfs.pcmfs.c文件通过setup_tables函数在内存中准备好要写入非易失介质中的superblock信息以及bitmap区域的信息,其中bitmap有inode的bitmap以及block的bitmap。分别对应着IMAPS以及ZMAPS。
Superblock的该文件系统整体信息的赋值,如第一个data区域所在的block编号,IMAP、ZMAP所占的block数目的赋值等。在该pcmfs文件系统中inode的bitmap占两个block,block的bitmap占8个block。
同样在内存中申请IMAPS和ZMAPS所占的空间大小,然后通过memset的函数把该区域的数据置0。
4. 初始化根节点inode的数据结构
在初始化文件系统时,必须初始化根节点的信息,整个系统才有了开始索引、操作的入口。根节点所指向的数据区域是整个data区的第一个数据块。即inode->i_zone[0] =Super.s_firstdatazone;
由于根节点是一个目录,所以其数据区其实就是一个个的目录项。每个目录项占16个字节。目录项的定义在头文件Pcmfs_fs.h中。目录项如下
struct pcmfs_dir_entry {
__u16 inode;
char name[0];
}
初始化是需要在目录项中写入两个内容。即当前目录的inode号,以及父目录的inode号。由于为根节点,故父目录的inode号与当前目录inode号实则是一样的。写入的两项内容如下
#define ROOT_INO_STRING "\001\000"
static char root_dentry[BLOCK_SIZE] =
ROOT_INO_STRING ".\0\0\0\0\0\0\0\0\0\0\0\0\0"
ROOT_INO_STRING "..\0\0\0\0\0\0\0\0\0\0\0\0";
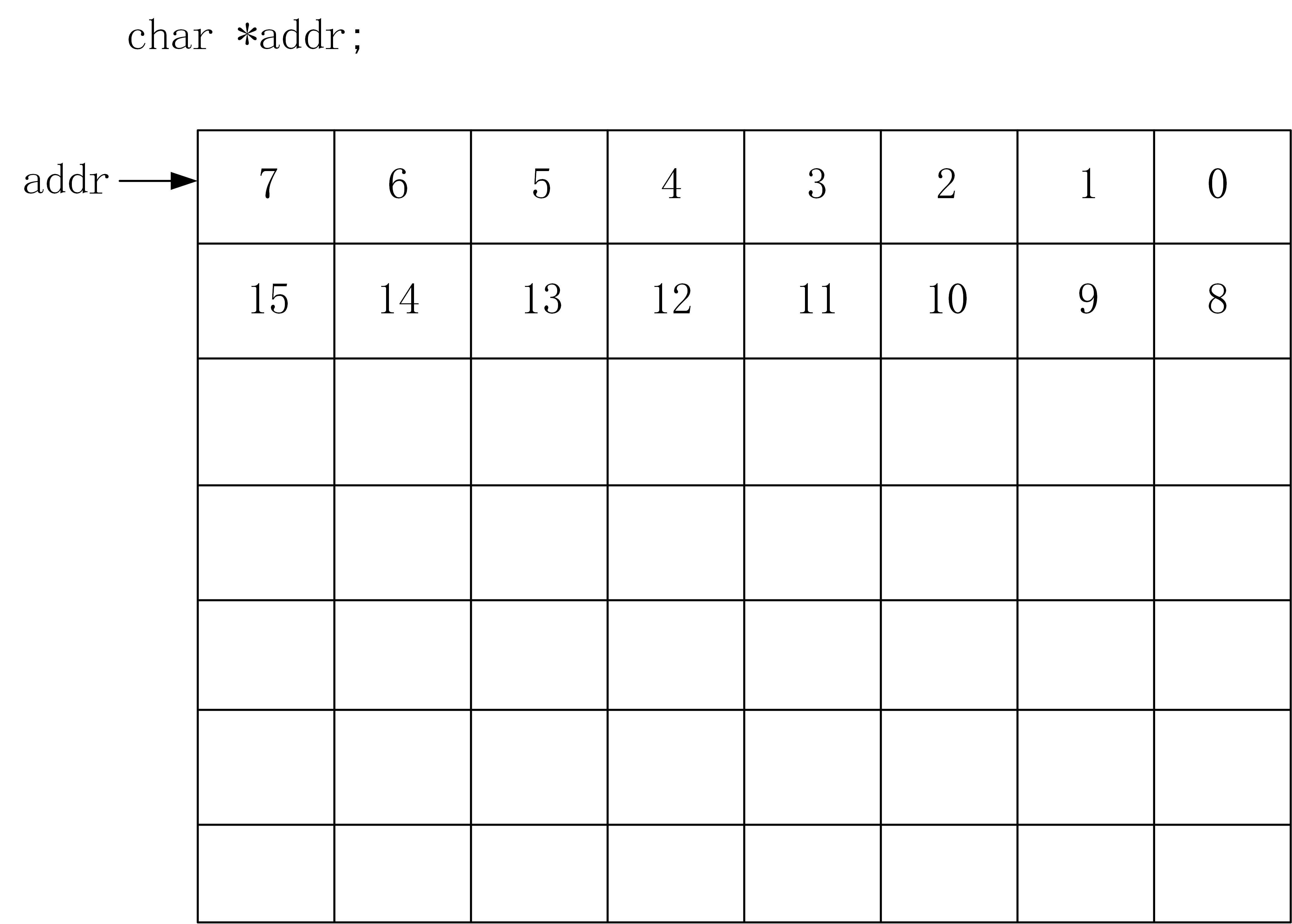
其中ROOT_INO_STRING是inode号,".\0\0\0\0\0\0\0\0\0\0\0\0\0"为该inode号对应内容。这里实则填充了两项,表示的是当前目录 . 以及父目录 .. 的inode号。为了方便理解,见下图
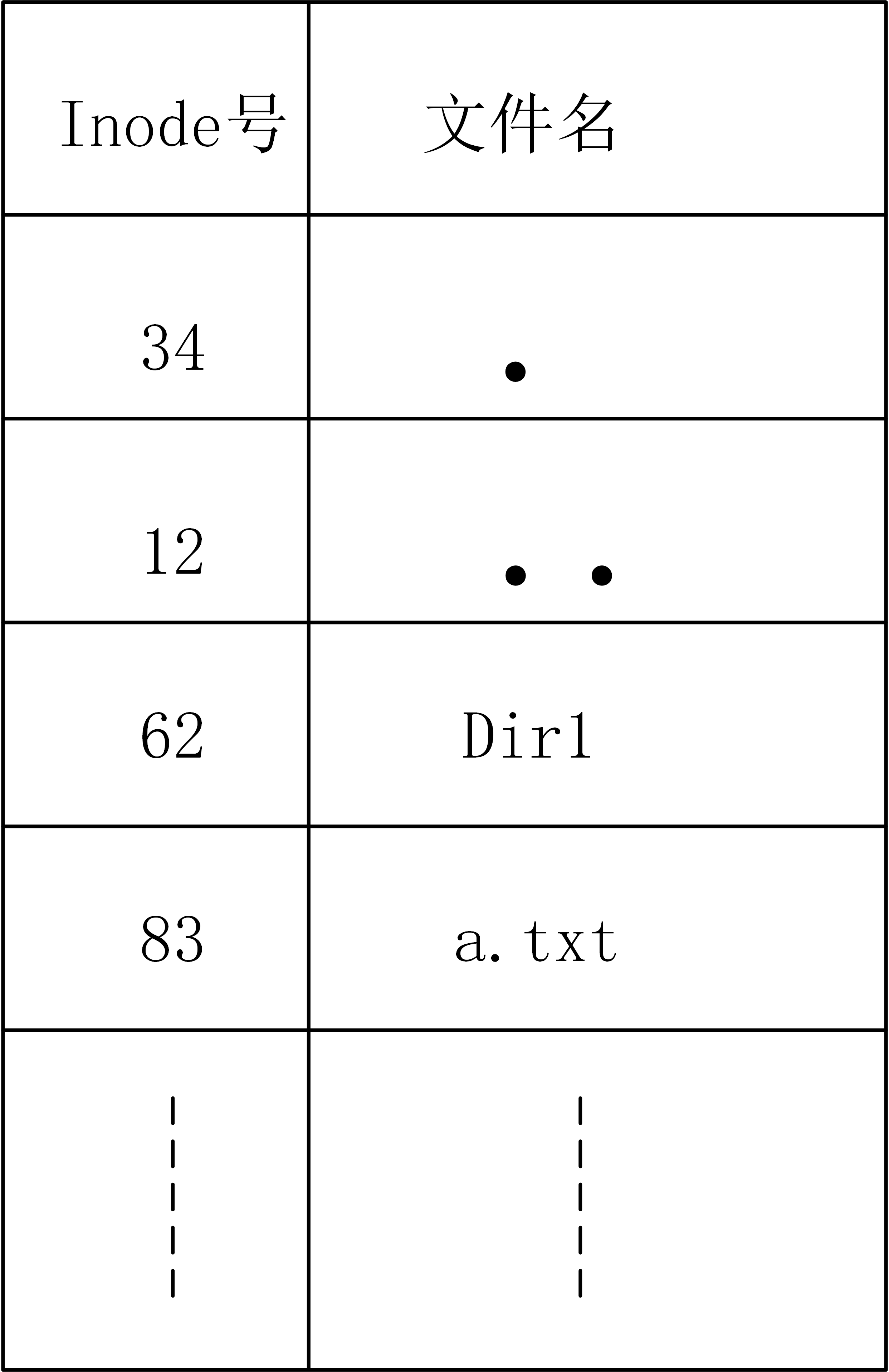
图2 dentry结构图
如上图,每个目录的数据区都可理解为上述表,每一个表项有16个字节,前两个表项的文件名是固定的,分别是当前目录对应的inode号以及父目录对应的inode号。上述初始化实则初始前两项。在内存中准备好该数据后,在通过write函数写到非易失介质中。
5.将初始化的数据写到介质中
该功能更通过write_tables函数实现。该函数主要通过调用write函数将准备好在内存中的超级块的内容以及bitmap的内容写入到介质中。这里指的注意的是write函数要按顺序写。由于pcmfs文件系统的整体结构图如下
图3 pcmfs文件系统结构图
仔细观察上图。inode bitmap 占2个block;data bitmap占8个block。故该文件系统设计中,理想情况,每个inode索引节点只是的文件占4个block(8/2=4),这样就不会出现data bitmap用完,而inode bitmap和inode table未用完 或者 inode bitmap和inode table用完,而data bitmap未用完的情况。
故在调用write函数,要按顺序写入,即先写superblock,然后写bitmap区域。因为write函数写的区域是设备上当前指针所指向的区域。在写过程中,指针后移,故要按顺序写入。
另外注意一点的是图3中若block大小为1k,(1024B),则inode bitmap的起始block为第3个block。若为blokc大小大于1k,如为2k,3k等等,则预留字节和super block的字节都可以写在第一个block中,即inode bitmap的起始block为第2个block
至此,设备的mkfs工作完毕。